前言
无人机的试飞测试不同于其他兵种。若未做好检查就贸然开飞会造成严重后果!轻则造成财产损失,重则导致人身伤害!!
务必做到以下事项后再起飞
1.飞控以及导航必须先在小飞机上进行多次试飞,熟悉、测试过后才能用大无人机进行试飞
2.基础“灯语”需要读懂,绿灯单闪(GPS定位)或者双闪(光流法)才能起飞,其他情况不要起飞,姿态模式容易找不到方向导致坠机!!
3.试飞测试时要把无人机栓好绳子,起初我觉得这是多此一举,结果后面试飞的时候真的出现了失控情况(经无人机黑匣子数据分析后发现是光流传感器被挡住了,导致无人机失控爬升)
4.无人机桨叶受损了就要及时更换,不要图省事,空中碎桨的话桨叶化身破片手雷,危险度极高。有个学长就是被无人机的碎桨打到大腿了,直接血流不止。
待解决/优化问题
1.减重。重量太大,过不了审核还费电
2.增加续航。飞机平均充满后可飞行一分半左右,非满电状态续航则更差,在无法更换电机及增加电池的情况下只能寄希望于新电池可带来更好的续航
3.集中弹道。重新设计枪口,改善卡弹及尿弹的情况,对pitch轴进行优化,减少晃动?
4.减少共振。共振发生时容易打到浆保坠机,容易使主控不稳定导致误判,导致云台乱晃导致弹道乱甩。
飞机试飞曾遇到问题
1.无GPS无光流起飞,十分不稳定,因无人机机头与人的视角不平行,难以反应操控。在地下车库撞墙,损坏桨叶
2.无GPS有光流起飞,,因为光流方向不对,底部光流的插口方向应指向机头!导致飞机往一个地方飞,越偏越快,导致只能手动控制平衡
试飞记录
第一次试飞(成功?)
情况或原因:浆保因为设计问题太过摇晃,并未安装浆保起飞,飞行十分平稳,飞机为GPS单闪模式。平稳降落
解决办法:对浆保覆盖的网进行重装
第二次试飞(失败)
情况或原因:起飞后浆保摇晃被桨叶打到,在低空坠机,只损坏浆保
解决办法:在浆保四个角加上碳棒支撑
第三次试飞(失败)
情况或原因:共起飞三次,前两次起飞到发射位置后低电量自动降落,第三次再次挂到浆保坠机。损坏四片桨叶、脚架碳管破裂。
解决办法:降低自动降落电量阈值,起飞前检查是否电池并联是否成功(每组串联电池分别启动,两组都能单独驱动系统即为成功)。更改打印件材质,使其更加稳定,不易吸水产生误差。

第四次试飞(失败)
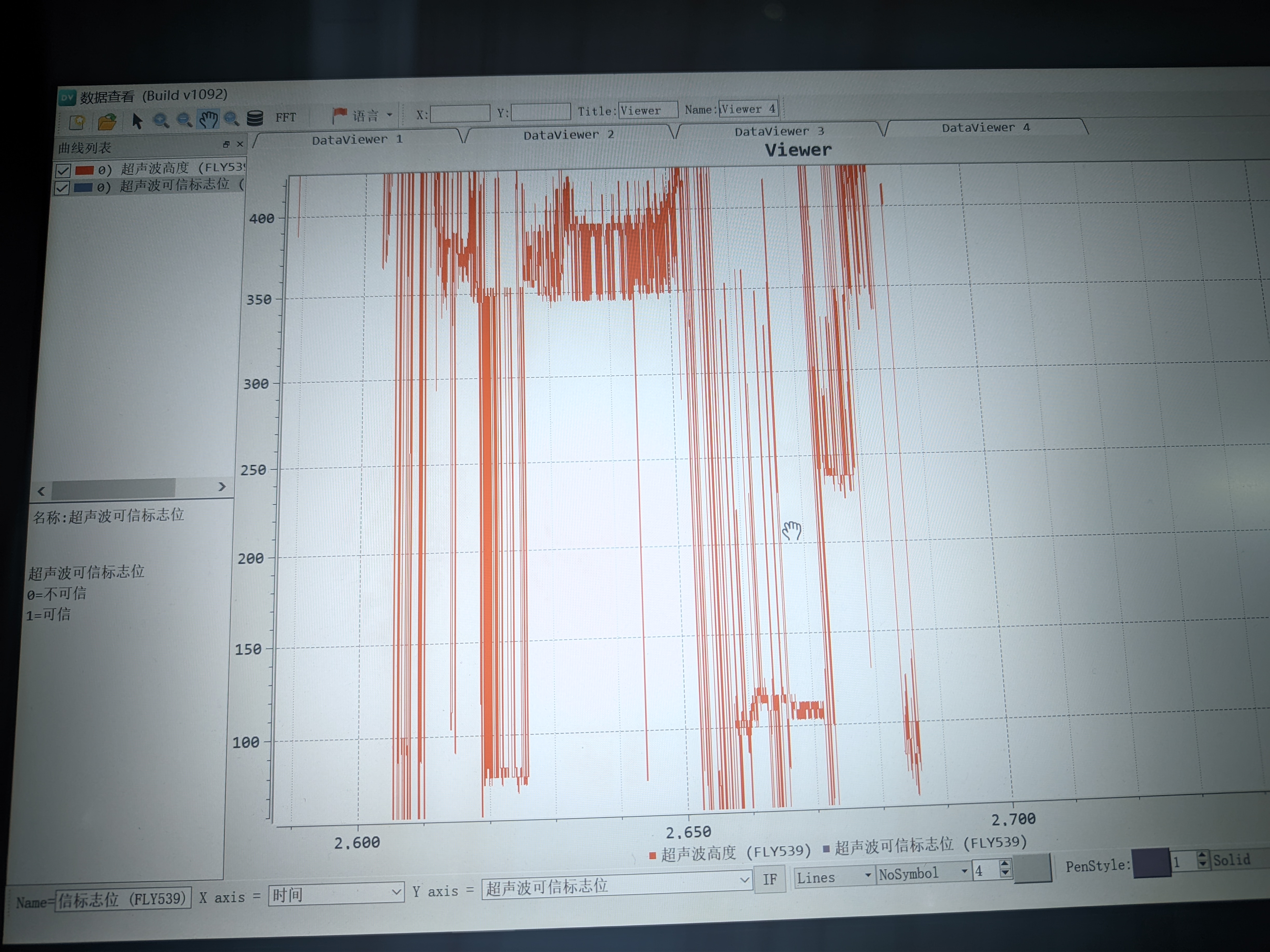
情况或原因:起飞后浆保基本稳定,摇晃情况明显改善。但起飞后失控,高度不受控一直抬高,遥控器向下拨杆无法降低高度,后被保险绳拉至失衡坠机,后通过分析黑匣子数据,得出结论,因为底部光流模块的超声波测距疑似被遮挡,导致无人机误判为严重掉高,故而不受控爬升,最后坠机。损坏浆保、一片桨叶。
解决办法:更改光流传感器安装位置,减少遮挡,更改安全绳牵引位置。尽量避免对guidence的遮挡(哪怕系统灯单闪也即只使用GPS的情况下,光流模块依然对系统具有作用,甚至定高的优先级大于气压计,所以要优先保证其不被遮挡)。

第五次试飞(半成功)
情况或原因:第一次出现疑似电流保护导致整机断电,摔坏云台只能无云台下起飞并返航,并出现电池互冲
解决办法:将自动降落电压阈值降到最低。

第六次试飞(成功)
情况或原因:视频已通过但是重量其实并不达标,是作弊拿头顶机臂减重量的。起飞后浆保平稳,续航一般,枪管被卸去后尿弹才勉强打完50发。命中率感人。
解决办法:新电池看看能不能减些重,枪管重新设计。飞控挪个位置避免被共振影响

评论区